|
Arun Srivatsan Rangaprasad I am a researcher at Apple, where I lead a team to develop algorithms for augmented and virtual reality systems. I have over 15 years of experience in research, with a focus on computer vision, machine learning, and robotics. I have a proven track record of taking projects from concept to completion by solving challenging problems with innovative solutions. Specialities : Computer vision / Deep learning / Point cloud registration / 3D reconstruction / Data encryption and encoding / Color science / SLAM / Classical machine learning / Sensor design and calibration BioPrior to joining Apple, I did my postdoc at the Robotics Institute in Carnegie Mellon University, where I explored deep learning techniques for 3D reconstruction, pose estimation and tracking. This research built on my PhD thesis work on probabilistic approaches for pose estimation. My research finds application in augmented reality, situational awareness in robotic surgery as well as manufacturing. In 2017, I was awarded a fellowship by the Centre for Machine Learning and Health. In my Masters research, I was involved in the design, development and analysis of a novel parallel manipulator robot platform. I received the gold medal in 2012 from the Indian Institute of Technology Madras. I also have an active interest in product development. I had a brief stint developing a product called Tangle , that keeps earphones from entangling. We ran an Indiegogo campaign and sold the product to 18 countries.
|
 Email: rarunsrivatsan[at]gmail.com
CV /
Thesis /
Google Scholar /
|
ProjectsAlgorithms for Augmented and Virtual Reality |
|
Working on various computer vision and machine learning algorithms for augmented and virtual reality. These algorithms find application in iPhones, iPads and the Apple Vision Pro. Seamlessly blending the physical world with digital content can be a powerful tool for a variety of tasks, including productivity, mindfulness, creativity, gaming, and entertainment.
|
App Clip Codes |
An App Clip is a lightweight version of your app that lets people perform everyday tasks quickly, without downloading and installing your app. The easiest way to launch an App Clip is by scanning an App Clip Code. Its distinct design is immediately recognizable, and people trust it to offer a fast, secure way to launch your App Clip.
App Clip Codes were announced in WWDC 2020 and the scanning has been supported by all iOS devices since 2020. App Clip Codes have been widely adopted by several companies around the world including Exxon, Macys, Panera Bread, etc.
|
Deep learning for Point Cloud Registration |

|
MaskNet: A Fully-Convolutional Network to Estimate Inlier Points
Correspondence Matrices are Underrated
|
|
PCRNet: Point Cloud Registration Network using PointNet Encoding
|
|
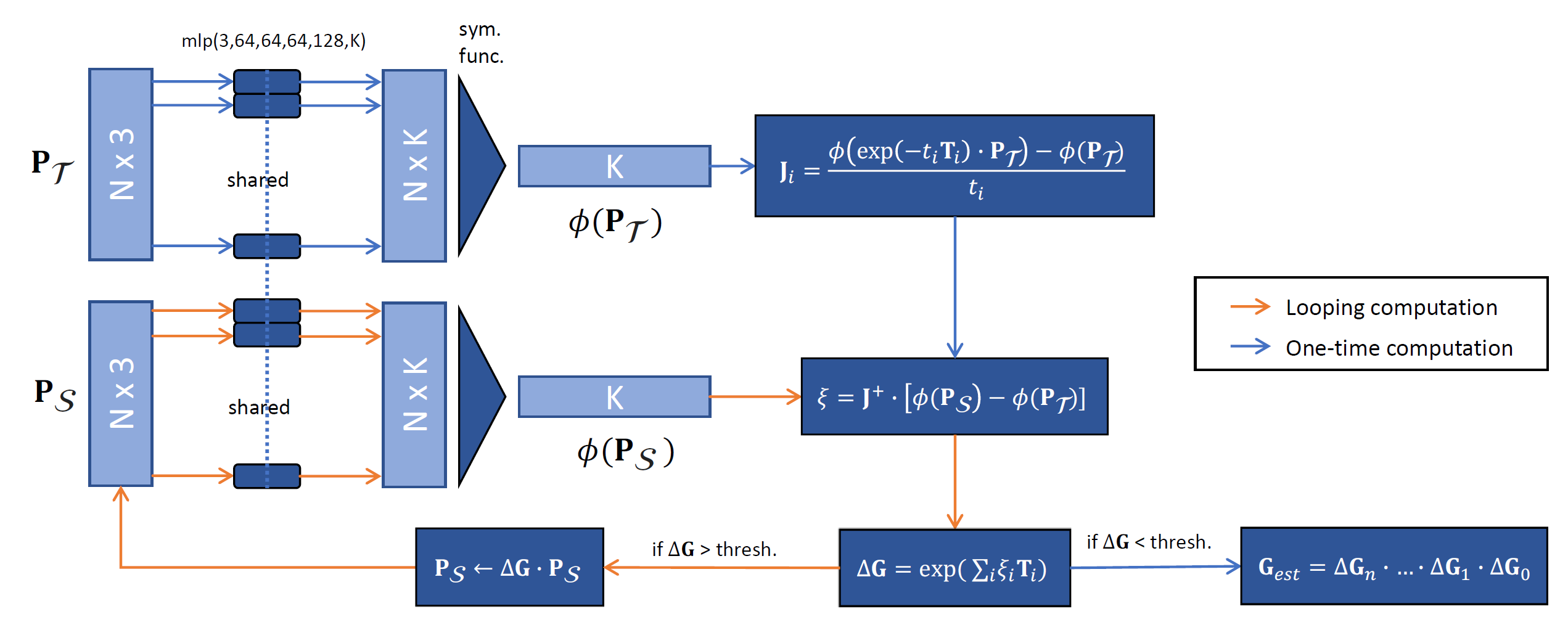
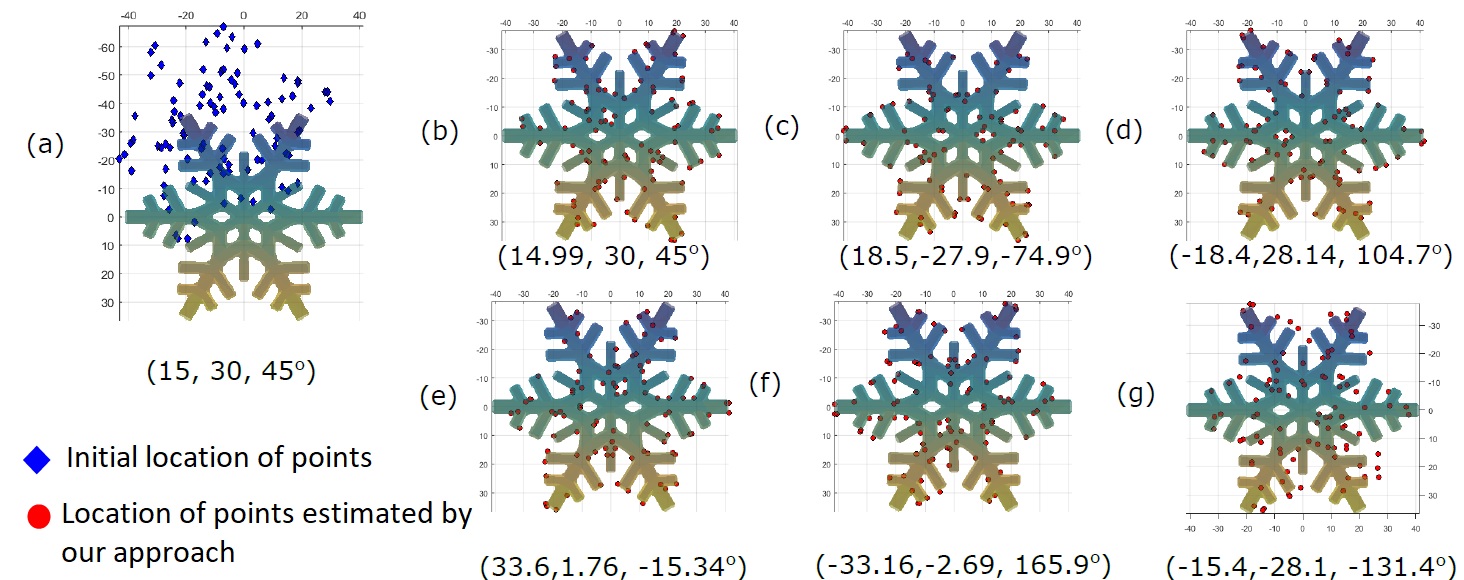
PointNetLK: Robust & Efficient Point Cloud Registration using PointNet
|
Learning for Visual Place Recognition |
|
MRS-VPR: a multi-resolution sampling based global visual place recognition method
|
|
A Multi-Domain Feature Learning Method for Visual Place Recognition
|
Probabilistic Approaches to Pose EstimationFor more information click here. |
|
Globally optimal registration of noisy point clouds
Probabilistic Pose Estimation Using a Bingham Distribution-Based Linear Filter
Bingham Distribution-Based Linear Filter for Online Pose Estimation
|
|
Estimating SE(3) elements using a dual-quaternion based linear Kalman filter
|
|
Registration with a small number of sparse measurements
Sparse Point Registration
|
|
Multiple Start Branch and Prune Filtering Algorithm for Nonconvex Optimization
|
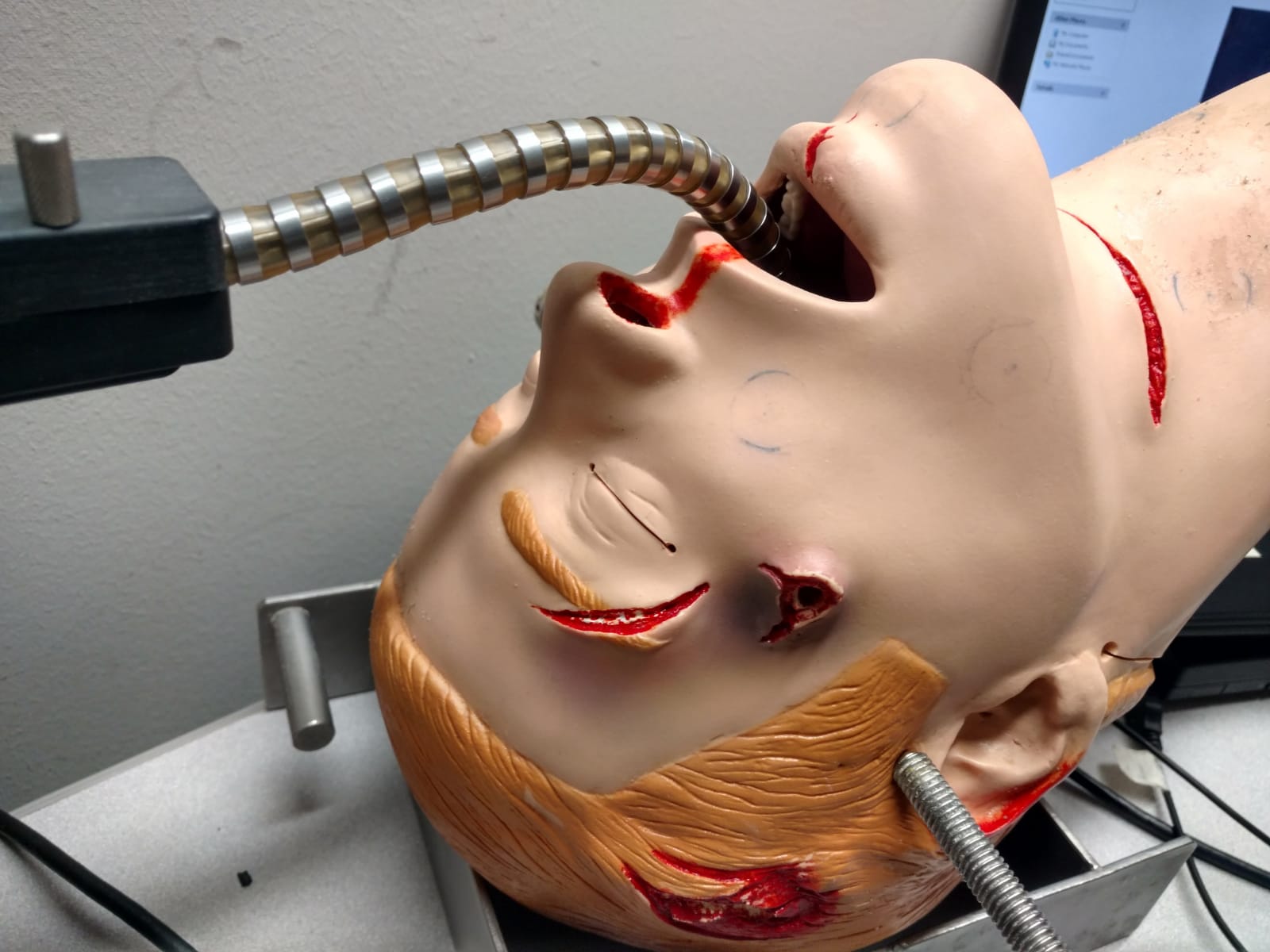
Approaches for Complementary Situational Awareness in Minimially Invasive SurgeriesFor more information click here. |
|
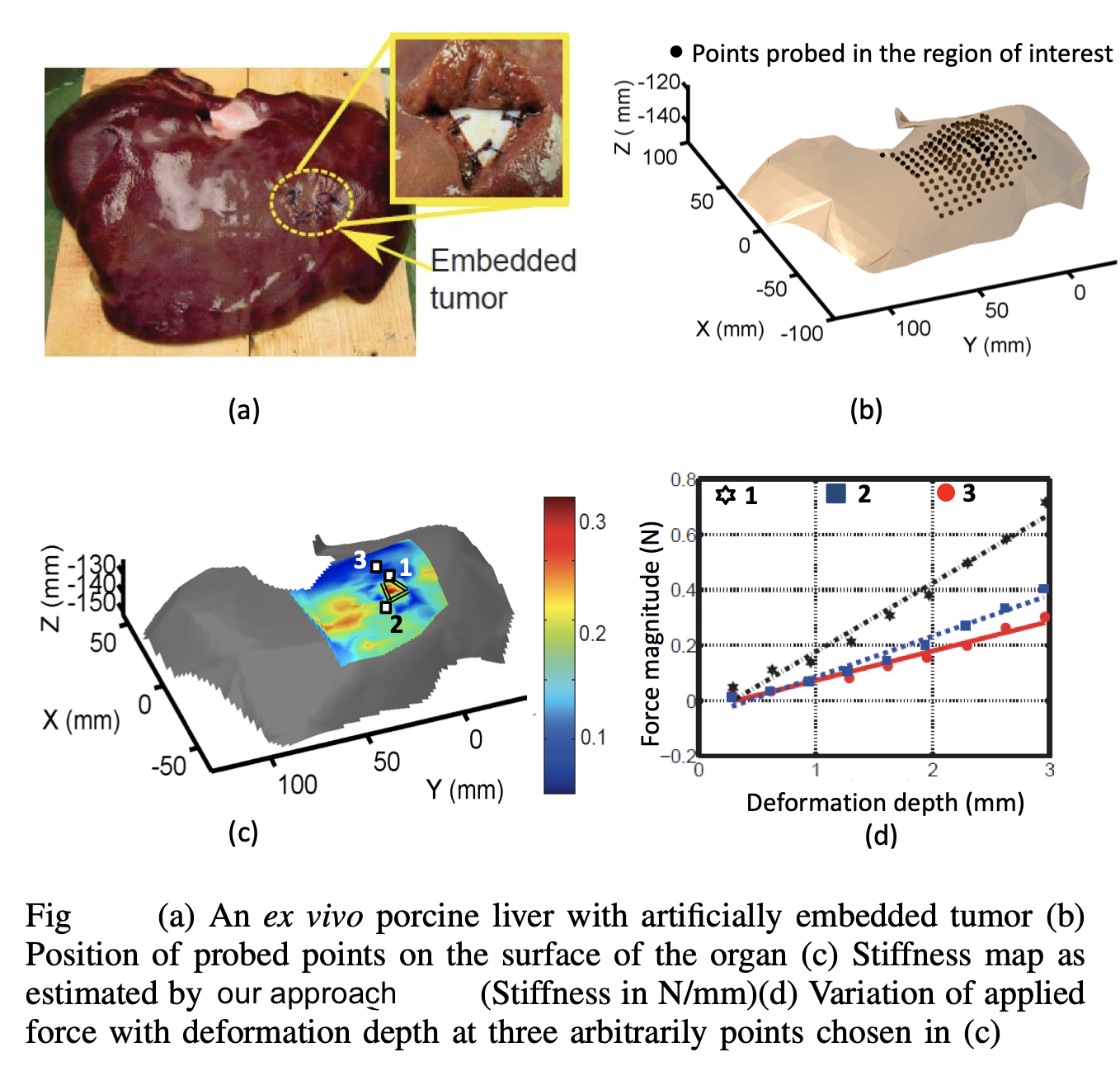
Complementary Model Update: A Method for Simultaneous Registration and Stiffness Mapping in Flexible Environments
Simultaneous Registration and Stiffness mapping of a Flexible Environment using Stiffness and Geometric Prior
|
|
Multimodal Approach to Registration Using Stereo Imaging and Contact Sensing
Registering Surgical Tool to a Soft Body using Mechanical Palpation
Hand-held stiffness measurement device for tissue analysis
|
Tissue Stiffness Mapping Strategies |
|
Trajectory-Optimized Sensing for Active Search of Tissue Abnormalities in Robotic Surgery
Using Bayesian Optimization to Guide Probing of a Flexible Environment for Simultaneous Registration and Stiffness Mapping
|
Augmented Reality for Surgical Applications |
|
A Real-time Augmented Reality Surgical System for Overlaying Stiffness Information
A surgical system for automatic registration, stiffness mapping and dynamic image overlay
Dynamic Texture Mapping of 3D models for Stiffness Map Visualization
|
Miniature Force Sensor Development |
|
Development of an Inexpensive Tri-axial Force Sensor for Minimally Invasive Surgery
|
BodySLAM for medical snake robotFor more information click here. |
|
Using Lie algebra for shape estimation of medical snake robots
Deep Q Reinforcement Learning for Autonomous Navigation of Surgical Snake Robot in Confined Spaces
|
Kinematics, design and analysis of parallel manipulatorsFor more information click here. |
|
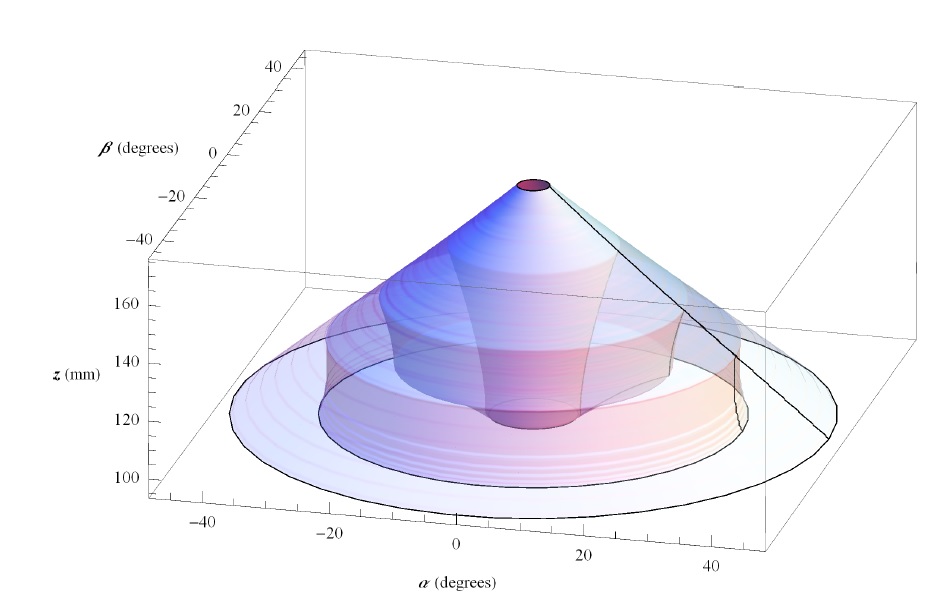
Computation of the safe working zones of parallel manipulators
Determination of the safe working zone of a parallel manipulator
|
|
On the position kinematic analysis of MaPaMan: a reconfigurable three-degrees-of-freedom spatial parallel manipulator
Analysis of the degrees-of-freedom of spatial parallel manipulators in regular and singular configurations
Analysis of constraint equations and their singularities
|
|
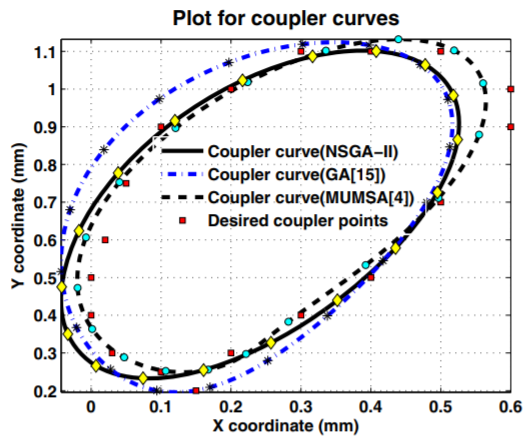
Coupler-curve synthesis of a planar four-bar mechanism using a genetic algorithm based optimization method
Coupler-curve synthesis via multi-objective optimisation using NSGA-II
|
Computational geometry |
|
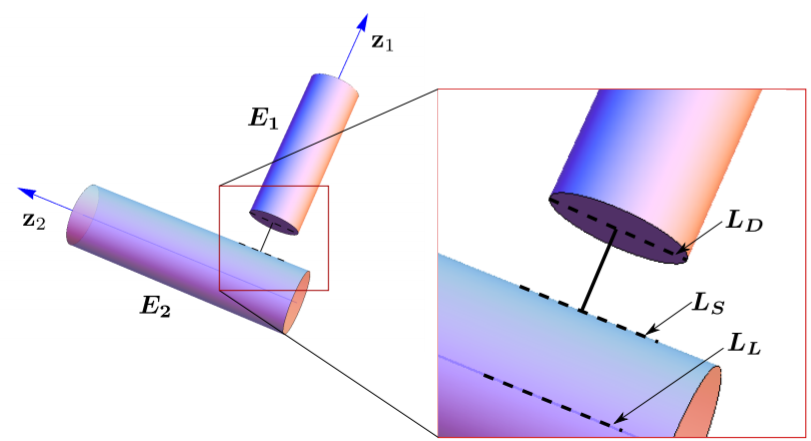
Analytical Determination of the Proximity of Two Right-circular Cylinders in Space
An analytical formulation for finding the proximity of two arbitrary cylinders in space
|
|
Minimum area enclosure and alpha hull of a set of freeform planar closed curves
|
|
|